
背景・課題
面歪スキャニングセンサー SPHYRNA は、いろいろな工程や現場で計測ができるように三脚に固定して使用します。また、持ち運びを考慮し計測範囲もW200×H200mmとコンパクトにしています。
このため、広範囲計測には対応していませんでした。
しかし、最近多くのお客様から、もっと大きな対象物の計測を行いたいとの声がありました。
実行施策
SPHYRNA の計測ヘッドを協働ロボットに取り付け、ロボットで計測ヘッドを移動させることで、
最大 980x700mm の広範囲計測を実現しました。
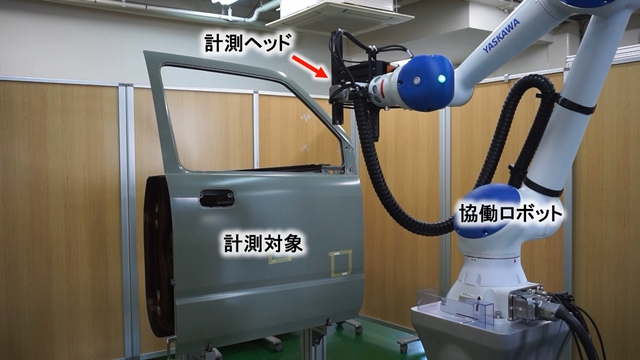
本装置は計測ヘッドを協働ロボットに取り付け、ロボットで計測ヘッドを移動させることで、200x200mm の計測を複数回行います。
計測回数は設定画面上で、
・1×1回 ・3×3回 ・5×4回 ・7×5回
から選択することができ、これにより、最大 980x700mm (7×5回時) の広範囲計測を実現しています。
1回の計測ごとに計測結果を表示し、2回目以降の計測結果は、ロボットの位置情報をもとに自動的に合成して表示します。
その場でリアルタイムに結果の評価が可能で、従来の高精度な三次元計測機では計測機の設定に多くの時間がかかりますが、本装置では計測の開始位置の設定のみで計測が開始できるため、圧倒的な作業時間の短縮が図れます。
